INTELIGENTNÍ VÝROBNÍ STROJE
Inteligentní výrobní stroje: Nová éra spolupráce mezi robotem, strojem a člověkem
Jak funguje robotika v průmyslu? V tomto textu se budeme věnovat zařízením a senzorům, které robotům pomáhají plnit rozmanité úkoly. Ukážeme vám, jak roboti vidí a pohybují se ve svém okolí pomocí speciálních „vision“ systémů. Vysvětlíme vám, jak senzory komunikují s řídícími jednotkami pomocí IO-Linku a jak to zvyšuje jejich výkon a přizpůsobivost. A nezapomeneme ani na bezpečnost – řekneme vám, jak zajistit, aby roboti neohrožovali lidi ani sebe při spolupráci s jinými stroji.


Autor: SICK
Nástroje a senzory na konci ramene robota
Roboti mohou používat různé nástroje na konci svého ramene, podle toho, co mají dělat. Tyto nástroje se nazývají „end of arm tooling“ a mohou to být například grippery a přísavky pro uchopení objektů, svářecí hlavice nebo jiná speciální zařízení. Aby robot věděl, kde je jeho rameno a jak ovládat nástroj, potřebuje senzory, které mu posílají informace o poloze a pohybu ramene, gripperu a dalších částech. Tyto senzory jsou součástí příslušenství robota a umožňují získávat informace o jeho okolí, a tak může robot přesně ovládat své nástroje. Zde jsou některé příklady, jak senzory pomáhají robotům v průmyslu:
- Tlakové snímače měří sílu, s jakou roboti přisávají díly pomocí vzduchových přísavek. Takto roboti zjistí, zda mají díl správně uchopený a mohou ho přemístit.
- RFID nebo magnetické tagy umožňují robotům rozpoznat, jaký nástroj mají na konci ramene. Takto roboti mohou vyměňovat nástroje podle potřeby a používat je správně.
- Optická vlákna, miniaturní optické snímače nebo indukční snímače detekují přítomnost dílů v blízkosti robota. Takto roboti mohou reagovat na změny v prostředí a přizpůsobit se jim. Tyto malé senzory se dají snadno umístit do gripperu robota.
Obrázek: SICK
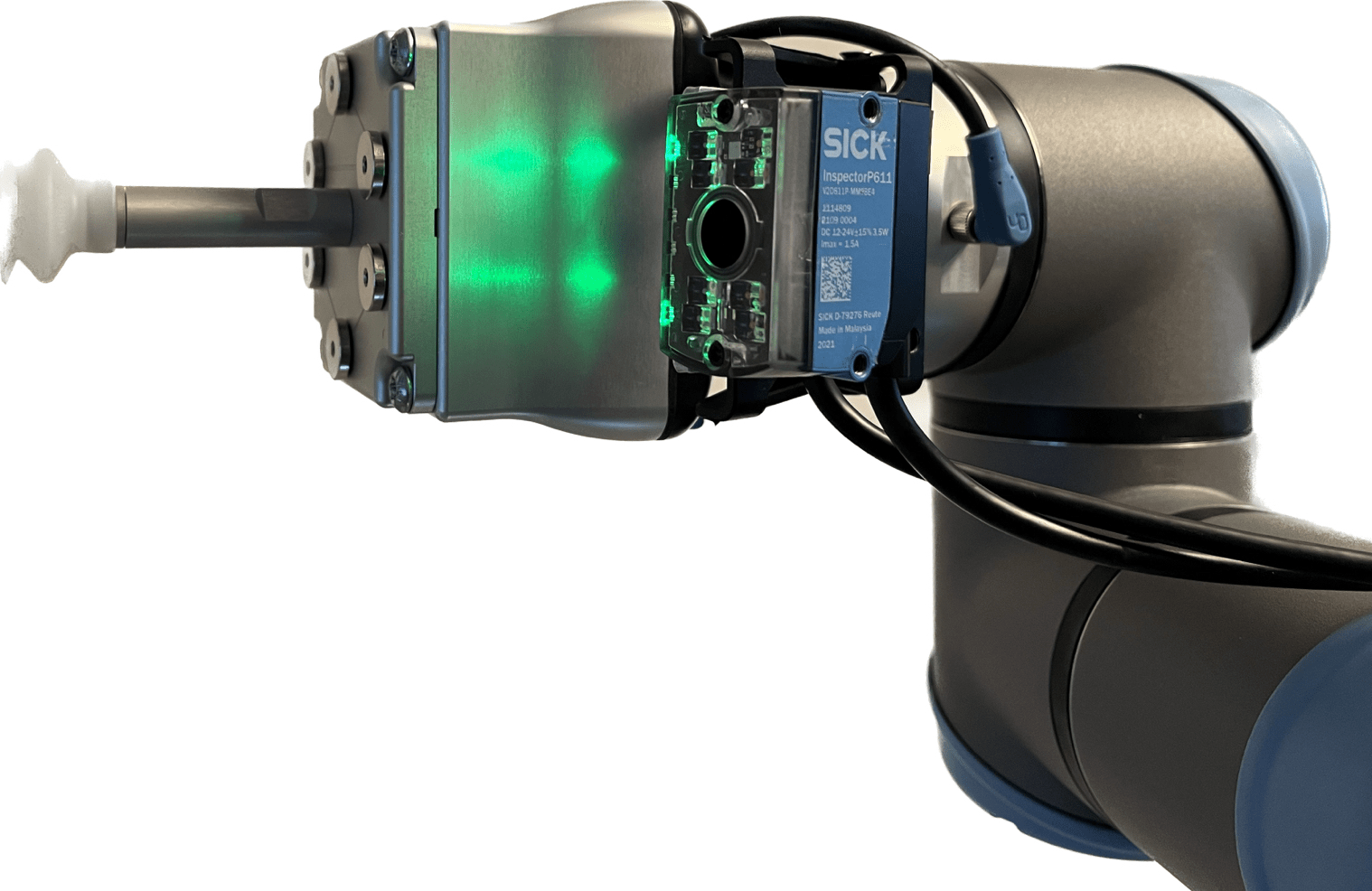
Systémy robotického vidění
Aby robot viděl, pomáhají mu kamerové senzory. Ty navádí robota na výrobky nebo polotovary a umožňují mu tak orientaci ve 2D nebo 3D prostoru, v závislosti na požadované aplikaci. Tam, kde je výška výrobků přibližně stejná a liší se tvarem nebo polohou, postačí 2D kamerové senzory. Tam, kde se může lišit i výška výrobku nebo tam, kde jsou polotovary různých tvarů založené v různě vysokých vrstvách, se používají 3D kamerové senzory.
Typickou aplikací pracující ve 2D prostoru je aplikace navádění robota na vybrané díly PLOC2D. Aplikace je předem nainstalována přímo ve 2D kamerovém senzoru a její nastavení probíhá přes její webové rozhraní. Tato aplikace dokáže pomocí výkonného algoritmu rozpoznat a lokalizovat různé díly, na které pak přímo navádí robota. Může se jednat o výběr jedné součástky nebo i více dílů umístěných na paletě, na deskové ploše nebo i z pohybujícího se dopravníkového pásu. S příchodem nové verze aplikace jsou začleněny i nové kamery řady PLOC2D-611, které lze díky kompaktním rozměrům, použít do úzkých prostor nebo je lze montovat přímo na rameno robota, a to zejména u malých robotů.
Obrázek:SICK
Pro snímání pomocí 3D kamerových senzorů jsou určeny následující dva systémy. První systém PLB je navádění robota, určení přesné polohy a výběr výrobků nebo jejich součástí na paletách, v ohradových paletách, přepravních koších nebo v přepravních drátěných kontejnerech. Aplikace může na základě různých algoritmů vybírat buď jednoduché pravidelné díly nebo i složitější na základě předem vloženého CAD modelu tohoto dílu a CAD modelu robotického úchopu. Systém pomocí sofistikovaného algoritmu vybere nejlepší způsob odebrání ze zásobníku. Výhodou aplikace je přímé spojení s robotem, které navíc obsahuje funkce pro jednoduchou integraci s řídící jednotkou robota. Ke skenování materiálu dochází vždy před odebráním jednotlivého dílu robotem, z důvodu eliminace posunu materiálu. Nově bylo portfolio rozšířeno o řadu specializovaných 3D kamerových senzorů. Ať již se jedná o kamery s krátkým dosahem pro výběr z malých prostor, kamery s vysokým rozlišením pro výběr malých předmětů, nebo miniaturní 3D kamery s umístěním přímo na robota.

Obrázek: SICK
Další systém, který využívá 3D technologie, je tzv. “belt picking“ neboli výběr z dopravníkového pásu. Jedná se o jeden z nejrozšířejnějších systémů. Smyslem této aplikace je lokalizovat výrobek na pohybujícím se dopravníku a jeho orientaci a odeslat souřadnice do robota. Aplikace přesně monitoruje samotný předmět, ale i pohybující se dopravník, aby robot nemusel uchopit daný díl přímo v místě skenování ale klidně o několik metrů dále. Novinkou je použití tohoto systému ve spojení s 3D kamerovými senzory Ruler3000, které patří mezi špičku v oblasti 3D skenování z důvodu vysoké kvality a přesnosti snímání.

Obrázek: SICK
Komunikace IO-Link mezi senzory a dál
Senzory s IO-Link komunikací jsou výhodné, protože dokážou poslat více dat než jen zapnuto/vypnuto. I malé senzory mohou posílat například hodnoty tlaku, teploty, času nebo provádět logické funkce. Tyto senzory se spojují s IO-Link masterem, kterým je buď samostatný hardwarový blok nebo karta v řídící jednotce robota nebo PLC. Díky komunikaci IO-Link lze sledovat stav stroje na dálku a včas varovat před možnými poruchami. Například senzor může do nadřazeného systému poslat zprávu, že je na hraně životnosti, je potřeba vyčistit optickou čočku, vyměnit ložisko na stroji nebo informovat o zvyšující se teplotě motoru. Takto můžeme naplánovat údržbu stroje dřív, než se něco pokazí. Tím se vyhneme zbytečným odstávkám, a tedy ztrátám peněz a času.
Bezpečnostní opatření pro roboty
Mezi požadavky na roboty splňující standardy Průmyslu 4.0 patří i stroje, které se dokážou přizpůsobit různým situacím a spolupracovat s lidmi. To ale znamená, že musí být bezpečné a nikomu neublížit. Proto je důležitá bezpečnostní technika, která používá senzory a systémy, které robotům pomáhají vnímat a reagovat na své okolí. Takto se zvyšuje nejen bezpečnost, ale i produktivita v průmyslu.
Pokud chcete použít robota v průmyslu, je třeba se zamyslet nad základními předpoklady:
- Pro každou robotickou aplikaci je nutné provést posouzení rizika. Zvažte proto, zda potřebujete podporu odborníka na bezpečnost k nalezení a realizaci vhodných opatření pro minimalizaci rizik.
- Znáte směrnice a normy relevantní pro vaši robotickou aplikaci (např. ČSN EN ISO 12100, ČSN EN ISO 10218-1/2, ISO TS 15066)?
- Potřebujete podporu při aplikaci směrnic a norem na robotickou aplikaci?
- Je interakce mezi člověkem a robotem tak těsná, že je nutno uplatnit vysoké požadavky na bezpečnost a náklady na validaci provozní spolupráce člověka s robotem?
Se všemi uvedenými body je vždy lepší se obrátit na bezpečnostního odborníka, který je seznámený s platnou legislativou. Zkušený bezpečnostní specialista vám poskytne podporu od posouzení rizik, přes bezpečnostní koncept, až po uvedení robotické aplikace do provozu.

Obrázek:SICK
Závěrem
Roboti pro svou správnou a efektivní funkci potřebují dostat mnoho dat od senzorů. V budoucnu budou senzory ještě důležitější, protože díky nim budeme moci předvídat problémy a umožnit i vzdálené ovládání. Ruku v ruce s rozvojem robotiky jde ale také bezpečnost. Roboti musí být také bezpeční pro lidi, kteří s nimi pracují.